Uber 每四秒从每一位在线司机那里收到一次 GPS 坐标。高峰时段,活跃司机数量超过 500 万,换算下来是每分钟约 125 万次写入——还没算那些盯着地图等司机上门的乘客产生的读请求。
位置追踪管道是整个打车平台的心跳。它一旦变慢,司机和乘客的状态就开始错位;它一旦宕机,App 实际上就废了。
在 .NET 里实现这样一套管道,核心问题只有一个:什么时候不应该用数据库。GPS 更新高频、短命、天然地理化——关系型数据库扛不住这个写入压力,你需要 Redis。
这是”用 .NET 设计 Uber 同款系统”系列的第一篇,专注于位置追踪管道的实现。
把规模先量化
动手之前,先把数字落实:
- 500 万活跃司机,每人每 4 秒发一次 GPS 更新
- 约 125 万次/分钟写入打到 Redis 层
- 乘客看到的司机位置更新延迟要控制在 1 秒以内,才有”实时”的感觉
- 司机匹配——乘客叫车时,系统要在毫秒内找到附近可用的司机
最直觉的实现是把每次更新写进 SQL 表。两分钟之后,这张表就有 1.5 亿行,写入队列已经堆到地平线外了。这不是你想在凌晨十一点调试的瓶颈。
下面这套架构可以避开这个问题:
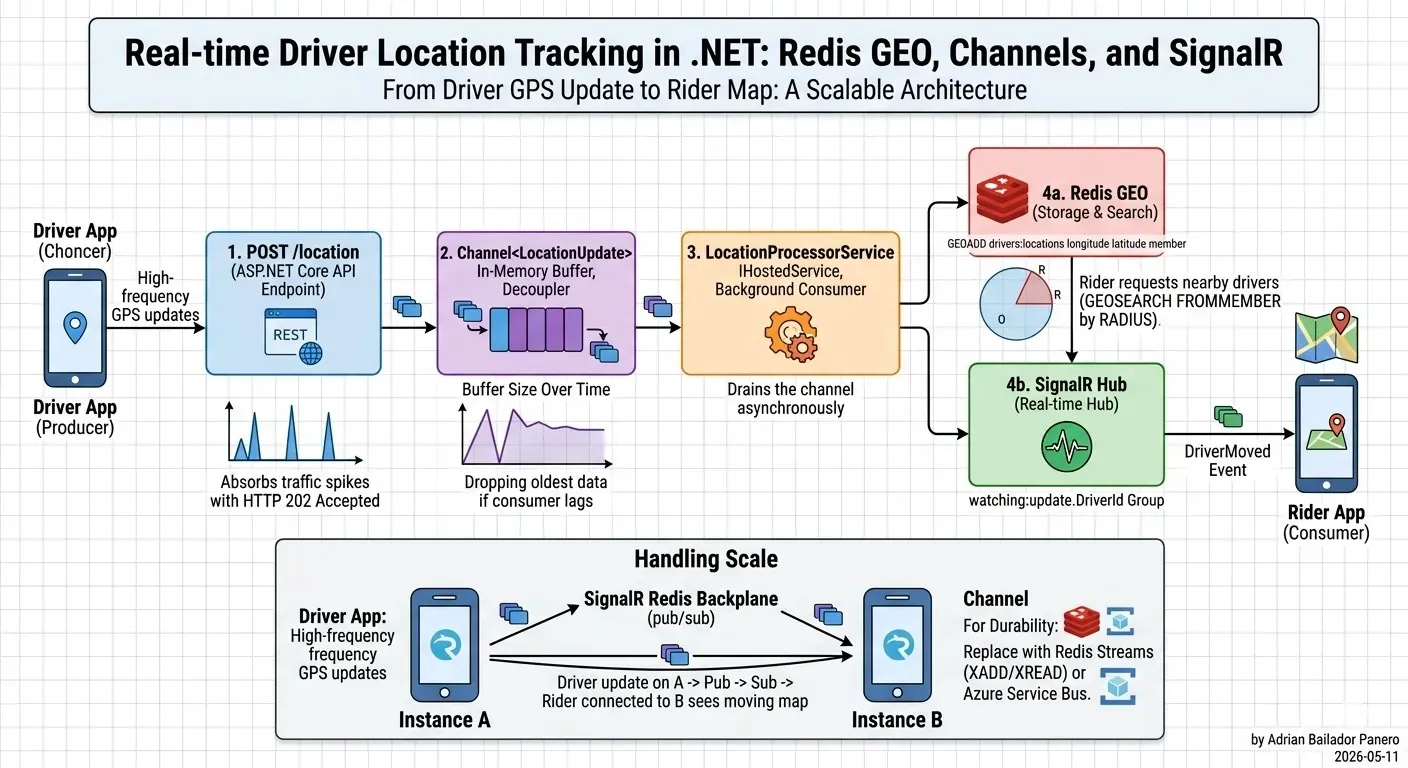
第一步:位置更新模型
数据结构保持简单。一次位置更新就是一条薄消息:
public record LocationUpdate(
string DriverId,
double Latitude,
double Longitude,
DateTimeOffset Timestamp);司机每 4 秒发一次这个 payload。这里不存历史——那是分析系统的活。这里只存当前位置。
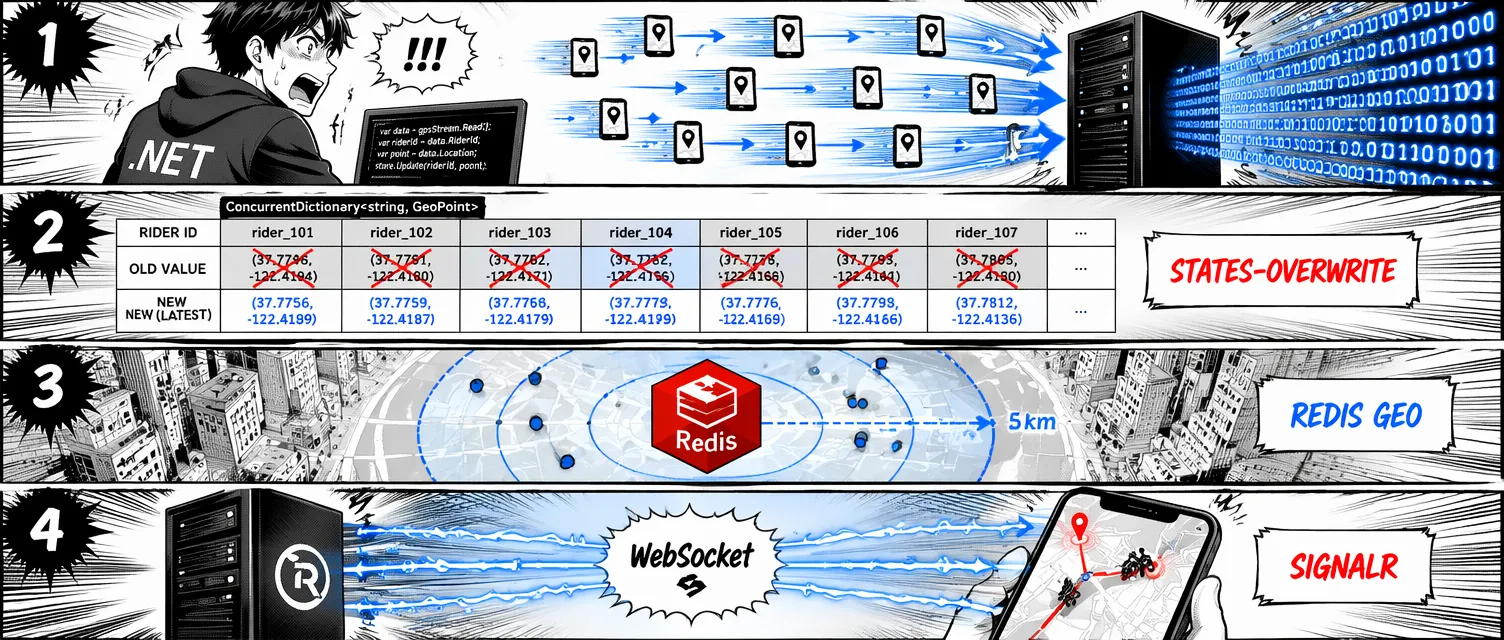
第二步:状态缓冲,而不是队列
第一反应往往是用队列——Channel<T>、消息总线,什么能缓冲更新就用什么。这个直觉对这个场景是错的。
队列隐含着”每条消息都重要”的语义。位置追踪只关心每位司机的最新位置。如果处理器忙着的时候一位司机发了 10 次更新,其中 9 次是噪音——你只需要最新那一条。队列会把 10 条全部保留并按顺序处理;等到处理第 10 条时,你处理的已经是历史,不是当下。
正确的模型是每位司机的可变状态。用 ConcurrentDictionary<string, LocationUpdate>,每次写入直接覆盖前一个值:
public class LocationStateBuffer
{
private readonly ConcurrentDictionary<string, LocationUpdate> _latest = new();
private readonly ConcurrentDictionary<string, byte> _dirty = new();
public void Update(LocationUpdate update)
{
_latest[update.DriverId] = update;
_dirty[update.DriverId] = 0;
}
public IReadOnlyList<LocationUpdate> TakeSnapshot()
{
var snapshot = new List<LocationUpdate>();
foreach (var driverId in _dirty.Keys.ToArray())
{
if (_dirty.TryRemove(driverId, out _) && _latest.TryGetValue(driverId, out var update))
snapshot.Add(update);
}
return snapshot;
}
}_dirty 集合追踪自上次刷新以来发送过更新的司机。TakeSnapshot 只返回这些司机——如果一位司机没移动,就没有东西需要写到 Redis。这意味着刷新开销正比于活跃度,而不是总司机数。
接收 HTTP 请求的端点写入是 O(1),无论后台处理器在做什么都不会阻塞:
app.MapPost("/drivers/{driverId}/location", (
string driverId,
LocationUpdateRequest request,
LocationStateBuffer buffer) =>
{
buffer.Update(new LocationUpdate(driverId, request.Latitude, request.Longitude, DateTimeOffset.UtcNow));
return Results.Accepted();
});不会溢出,不会让旧更新阻塞新更新。天然限速内置其中——如果一位司机在两次刷新之间发了 10 条更新,只产生 1 次 Redis 写入。
第三步:Redis GEO
Redis 内置基于有序集合的地理空间数据类型。核心命令:
GEOADD key longitude latitude member— 存储或更新一个位置GEOSEARCH key FROMMEMBER member BYRADIUS radius unit— 找到半径内所有成员GEOPOS key member— 获取成员的当前位置
用 StackExchange.Redis 封装:
public class RedisLocationStore
{
private readonly IDatabase _db;
private const string DriversKey = "drivers:locations";
public RedisLocationStore(IConnectionMultiplexer redis)
{
_db = redis.GetDatabase();
}
public async Task UpdateAsync(LocationUpdate update)
{
await _db.GeoAddAsync(DriversKey, new GeoEntry(
longitude: update.Longitude,
latitude: update.Latitude,
member: update.DriverId));
}
public async Task<IEnumerable<NearbyDriver>> FindNearbyAsync(
double latitude,
double longitude,
double radiusKm)
{
var results = await _db.GeoSearchAsync(
DriversKey,
longitude, latitude,
new GeoSearchCircle(radiusKm, GeoUnit.Kilometers),
options: GeoRadiusOptions.WithDistance | GeoRadiusOptions.WithCoordinates);
return results.Select(r => new NearbyDriver(
DriverId: r.Member.ToString(),
DistanceKm: r.Distance ?? 0,
Latitude: r.Position?.Latitude ?? 0,
Longitude: r.Position?.Longitude ?? 0));
}
}
public record NearbyDriver(string DriverId, double DistanceKm, double Latitude, double Longitude);GEOSEARCH 返回按距离排序的结果,速度快到可以在每次乘客请求时都实时查询——时间复杂度是 O(N+log(M)),其中 N 是结果集大小,不是总司机数。
值得注意的一点:Redis GEO 把位置存成压缩浮点数,精度损失约 0.6mm。导航场景完全可以接受。真正重要的是,即使存储了数百万个位置,GEOSEARCH 找 5km 内最近的 10 位司机也能在 1 毫秒以内完成。
第四步:后台处理器
BackgroundService 每 500ms 用 PeriodicTimer 把状态缓冲刷新到 Redis:
public class LocationProcessorService : BackgroundService
{
private readonly LocationStateBuffer _buffer;
private readonly ILocationStore _store;
private readonly IHubContext<DriverLocationHub> _hub;
private readonly ILogger<LocationProcessorService> _logger;
private static readonly TimeSpan FlushInterval = TimeSpan.FromMilliseconds(500);
protected override async Task ExecuteAsync(CancellationToken stoppingToken)
{
using var timer = new PeriodicTimer(FlushInterval);
while (await timer.WaitForNextTickAsync(stoppingToken))
{
var updates = _buffer.TakeSnapshot();
if (updates.Count == 0) continue;
foreach (var update in updates)
{
try
{
await _store.UpdateAsync(update);
await _hub.Clients
.Group($"watching:{update.DriverId}")
.SendAsync("DriverMoved", new
{
update.DriverId,
update.Latitude,
update.Longitude,
update.Timestamp
}, stoppingToken);
}
catch (Exception ex)
{
_logger.LogError(ex, "Failed flushing location for driver {DriverId}", update.DriverId);
}
}
}
}
}PeriodicTimer 是 .NET 6+ 在托管服务里做周期性工作的标准写法——它不会漂移(每次 tick 从上一次 tick 的开始时间算,而不是结束时间),取消也是自动处理的。
每次刷新只涉及自上次 tick 以来发送过更新的司机。如果没有司机移动,TakeSnapshot 返回空列表,循环立即跳过。Redis 写入和 SignalR 推送是独立的——推送失败不会阻塞 Redis 更新,乘客端漏掉单次 UI 通知在视觉上完全感知不到。
第五步:SignalR Hub
乘客在跟踪行程时打开 WebSocket 连接,加入以司机命名的 SignalR 分组:
public class DriverLocationHub : Hub
{
public async Task WatchDriver(string driverId)
{
// 先退出之前的分组
var previousDriver = Context.Items["watchingDriver"] as string;
if (previousDriver is not null)
await Groups.RemoveFromGroupAsync(Context.ConnectionId, $"watching:{previousDriver}");
await Groups.AddToGroupAsync(Context.ConnectionId, $"watching:{driverId}");
Context.Items["watchingDriver"] = driverId;
}
public async Task StopWatching()
{
var driverId = Context.Items["watchingDriver"] as string;
if (driverId is not null)
await Groups.RemoveFromGroupAsync(Context.ConnectionId, $"watching:{driverId}");
}
}客户端(精简版 TypeScript):
const connection = new signalR.HubConnectionBuilder()
.withUrl("/hubs/driver-location")
.withAutomaticReconnect()
.build();
connection.on("DriverMoved", (data) => {
updateDriverMarker(data.driverId, data.latitude, data.longitude);
});
await connection.start();
await connection.invoke("WatchDriver", driverId);withAutomaticReconnect() 是关键:移动网络随时会断。没有它,一次短暂断网就会让乘客面对一张冻结的地图,而且没有任何提示说明出了什么问题。
第六步:把所有部分串起来
var builder = WebApplication.CreateBuilder(args);
// Redis
var redis = await ConnectionMultiplexer.ConnectAsync(builder.Configuration["Redis:ConnectionString"]!);
builder.Services.AddSingleton<IConnectionMultiplexer>(redis);
builder.Services.AddSingleton<ILocationStore, RedisLocationStore>();
// 位置状态缓冲——每位司机的可变内存状态,周期性刷新
builder.Services.AddSingleton<LocationStateBuffer>();
// SignalR——水平扩展时加 .AddStackExchangeRedis(...)
builder.Services.AddSignalR();
// 后台处理器
builder.Services.AddHostedService<LocationProcessorService>();
var app = builder.Build();
app.MapPost("/drivers/{driverId}/location", (
string driverId,
LocationUpdateRequest request,
LocationStateBuffer buffer) =>
{
buffer.Update(new LocationUpdate(driverId, request.Latitude, request.Longitude, DateTimeOffset.UtcNow));
return Results.Accepted();
});
app.MapHub<DriverLocationHub>("/hubs/driver-location");
app.MapGet("/drivers/nearby", async (
double lat, double lon, double radius,
ILocationStore store) =>
{
var drivers = await store.FindNearbyAsync(lat, lon, radius);
return Results.Ok(drivers);
});
app.Run();水平扩展时的两处变化
上面这套单实例版本能撑住几千个并发司机。需要横向扩展时,有两件事要改:
SignalR 背板(Backplane)。SignalR 默认只把消息推到同一个服务器实例上的连接。多实例部署时,司机更新到达实例 A,乘客却连接着实例 B,地图就会卡住。解决方案是加一行 Redis 背板:
builder.Services.AddSignalR()
.AddStackExchangeRedis(builder.Configuration["Redis:ConnectionString"]!);一行代码,SignalR 就开始用 Redis pub/sub 把消息扇出到所有实例。
状态缓冲是单实例的。LocationStateBuffer 在内存中,实例重启不保留,也不跨实例共享。对这个场景来说没问题:司机每 4 秒重发一次位置,重启后几秒缓冲就重新填满,用户感知不到任何影响。
Uber 真实架构做了什么
Uber 的真实架构更复杂——他们用自研的地理空间分片系统 H3(六边形分层地理空间索引),按城市和区域对司机更新做分区,通过流式管道(Apache Kafka → Flink)处理位置数据。调度系统是独立服务,有自己的匹配算法。
我们构建的这套抓住了本质形态:不阻塞持久化的快速写入路径,毫秒级回答”附近有谁”的 Redis 地理索引,以及保持乘客地图实时更新的 WebSocket 通道。
两者的差距在规模和运维复杂度,不在架构方向。基础构件是一样的。
5 个常见错误
错误一:把位置直接写入 SQL
// ❌ 每次 GPS 更新都打到数据库
await _dbContext.DriverLocations.AddAsync(new DriverLocation
{
DriverId = update.DriverId,
Latitude = update.Latitude,
Longitude = update.Longitude,
Timestamp = update.Timestamp
});
await _dbContext.SaveChangesAsync();开发环境跑得飞快,生产环境直接崩。位置是短暂数据——你只需要当前位置,不需要每一条历史。如果要历史供分析,用时序存储或追加流异步写,不要嵌在请求路径里。
错误二:在 HTTP 线程上阻塞等待 Redis
// ❌ 每次司机请求都阻塞到 Redis 确认写入
await _redis.GeoAddAsync(DriversKey, new GeoEntry(lon, lat, driverId));
return Results.Ok();Redis 很快,但把网络 I/O 加到每次司机请求里会序列化你的吞吐量。状态缓冲把 HTTP 响应时间和 Redis 写入时间解耦——司机在微秒级拿到 202,Redis 在下一次刷新 tick 时跟上。
错误三:用队列处理本质是可变状态的问题
// ❌ Channel 把每条更新都排队——处理器会处理已过时的位置
Channel.CreateBounded<LocationUpdate>(new BoundedChannelOptions(10_000)
{
FullMode = BoundedChannelFullMode.DropOldest
});带 DropOldest 的有界队列在高负载下随机丢弃,而且会处理等消费者到达时早已过时的中间位置。位置追踪是状态问题,不是消息传递问题。建模成状态。
错误四:按行程 ID 而不是司机 ID 命名 SignalR 分组
// ❌ 用行程 ID 命名分组
await Groups.AddToGroupAsync(connectionId, $"trip:{tripId}");行程 ID 在重试和重新分配时会变。司机 ID 不变。用司机 ID 命名分组,让乘客在分配发生变化时加入/退出。
错误五:多实例部署忘了加 SignalR 背板
// ❌ 多实例,没有背板
// 司机更新到达实例 A,乘客连接在实例 B
// → 乘客地图冻结
builder.Services.AddSignalR(); // 缺少 .AddStackExchangeRedis(...)这是 SignalR 生产部署最常见的 Bug。单实例开发环境完全正常,扩展到两个实例时静默失效。
总结
位置追踪管道是一个把抽象与问题匹配好的案例。GPS 更新高频、短命、地理化——所以我们把它建模为可变状态(而不是队列),用 Redis GEO 而不是关系型表做索引,用 SignalR 而不是轮询做实时推送。
这里没有用到什么重量级框架,也不需要分布式系统博士学位。就是一个 ConcurrentDictionary、一个 Redis 有序集合、一个 WebSocket 分组——标准 .NET 原语,组合起来解决了一个真实的规模难题。
下一篇文章会构建行程状态机:一次打车从 Requested 到 Completed 的完整生命周期、如何处理并发状态转换,以及如何用 EF Core 持久化这套生命周期。